
Lidar激光雷达可用于测距应用。它可以向目标场景发射一束或多束光辐射,并通过分析从场景反射回激光雷达设备的光束特性来确定到场景的距离。在扫描式激光雷达中,诸如万向镜或旋转多边形镜何样的扫描器用于扫描目标场景的激光雷达光束,从而绘制目标场景的范围。激光雷达系统使用光学发射器和接收器阵列来同时测量场景中多个点的距离。
光子集成电路(PICs)用于激光雷达收发器阵列的光学元件小型化,从而可以在保持小设备占地的同时实现高通道密度。每个收发器的发射Tx和接收Rx通道在一个PIC中实现,使用各自的Tx和Rx波导进行光的输出和输入。在目前的PIC技术中,波导是由光刻技术生产,通常平行于PIC的平面衬底。光收发器阵列设计的挑战之一是如何高效、精确地耦合进出波导的光。
在名为“Lidar array with vertically-coupled transceivers”的专利申请中,苹果提出可以使用PIC的光收发器阵列内的转动镜来解决相关挑战。
转动镜具有相对于在其上形成阵列的平面衬底斜置的反射表面。在实施例中,所述阵列中的每个光收发器包括发射波导,发射波导将来自相干光源的出射光传输到用于从所述光收发器输出的转动镜。
光收发器同时包括接收波导,接收波导接收由转动镜反射的入射光并将所述入射光传输到所述光电探测器。在单基配置中,每个光收发器包括用于发送和接收的单个转动镜;而双基配置则有单独的发送和接收镜。
在一个实施例中,每个光收发器中的波导包括光斑大小转换器,例如锥形波导,其在出射光入射到转动镜之前调整出射光的光束直径和数值孔径。与安装在衬底上方的匹配准直透镜相结合,这种排列有助于提供良好的准直光束,同时减少不希望的反向反射到波导中的强度。
具体来说,锥形波导减少了反向反射,因为它可以通过使硅变细或使用氮化硅来减小折射率对比度,氮化硅的折射率对比度甚至更小。通过在锥度和镜面之间使用折射率匹配凝胶和/或使用悬挂边缘耦合器,可以进一步减少反向反射,从而降低菲涅耳反射。反向反射同时可以通过将边缘耦合器切割成一个角度来减少,或者创建一个水平倾斜,或者通过将波导相对于PIC的输出面倾斜,例如大约8度。
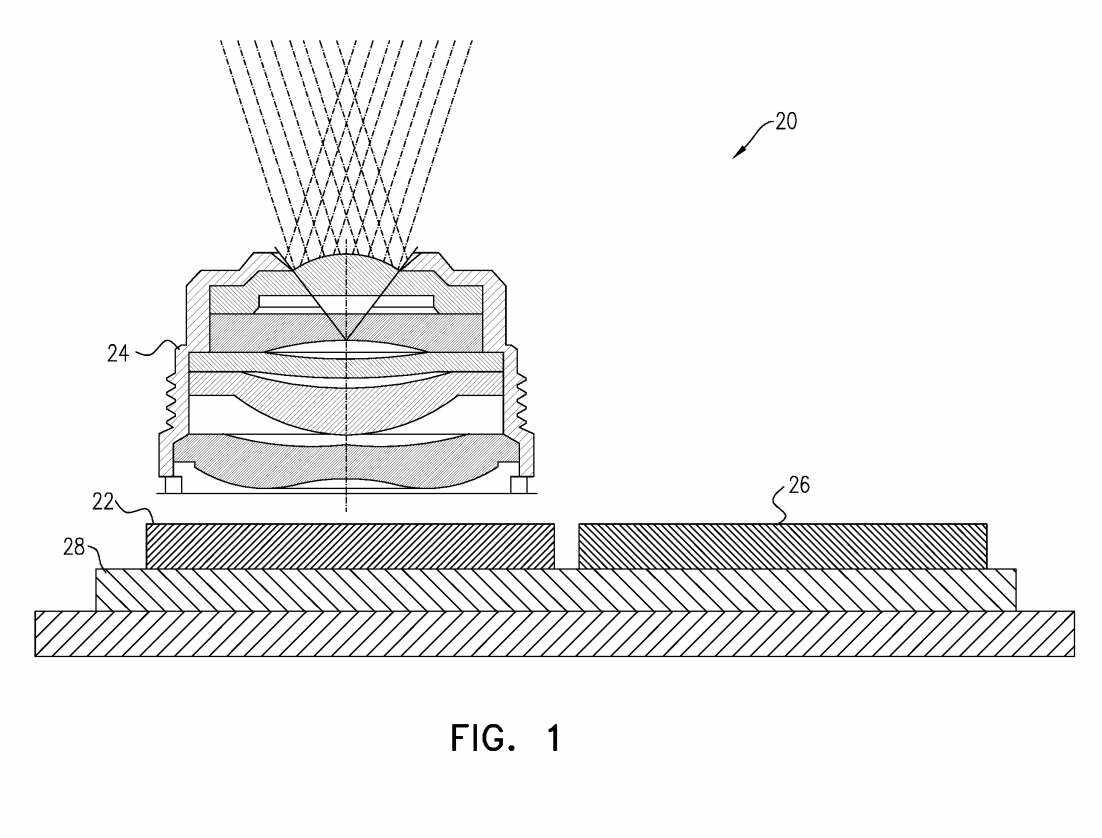
图1是激光雷达设备20的示意图剖面图。设备20包括PIC 22形式的光学传感装置,在其上形成光学收发器阵列。光学24准直从PIC 22发出的光,并将入射光聚焦到PIC。PIC 22安装在子安装衬底上,例如中间层28,并且通过中间层28上的电走线连接到电子处理和控制电路26。
或者,至少一些电子处理和控制电路可以在PIC本身上实现。通常,电路26包括射频模拟电路和深度处理逻辑,其处理PIC 22上的光收发器输出的信号以产生目标场景的深度图。
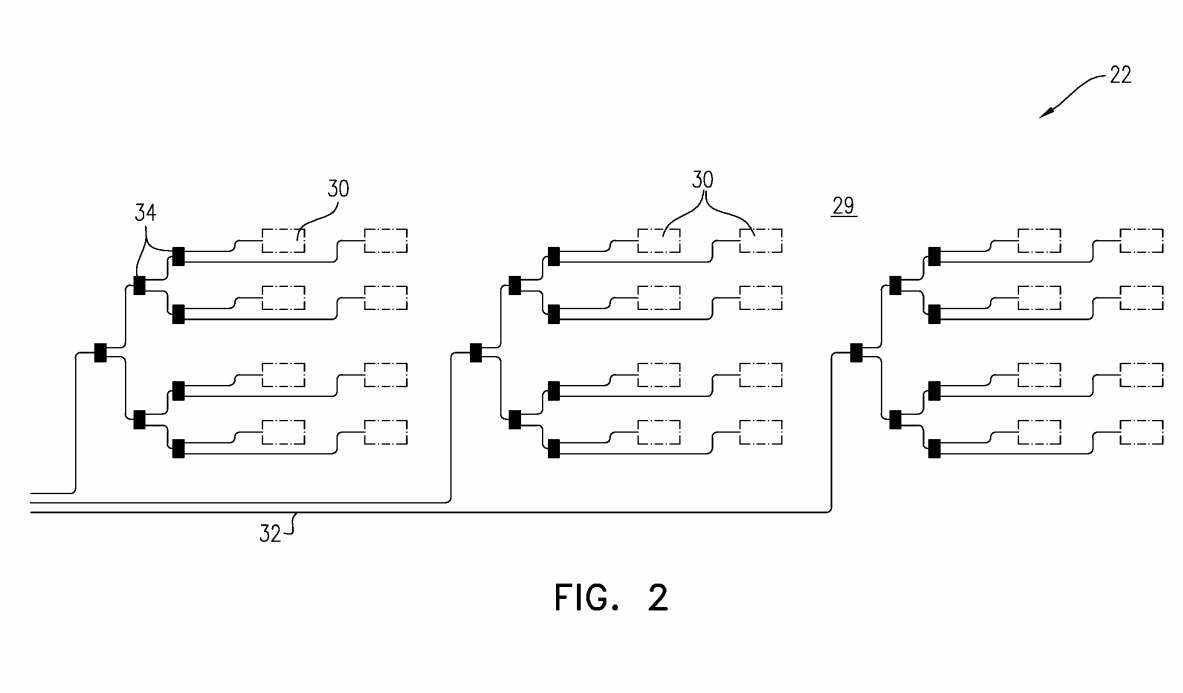
图2示出PIC 22上的光收发器30阵列。PIC 22包括衬底29。PIC 29上的波导32传输来自相干光源的激光辐射,例如调频高功率激光源。光分离器34将激光辐射分配给收发器30。当所有收发器并行操作时,分配器可以是无源的,或者为了选择性地操作单个收发器或收发器组而主动操作。每个光收发器30包括用于感应接收光的光电探测器。
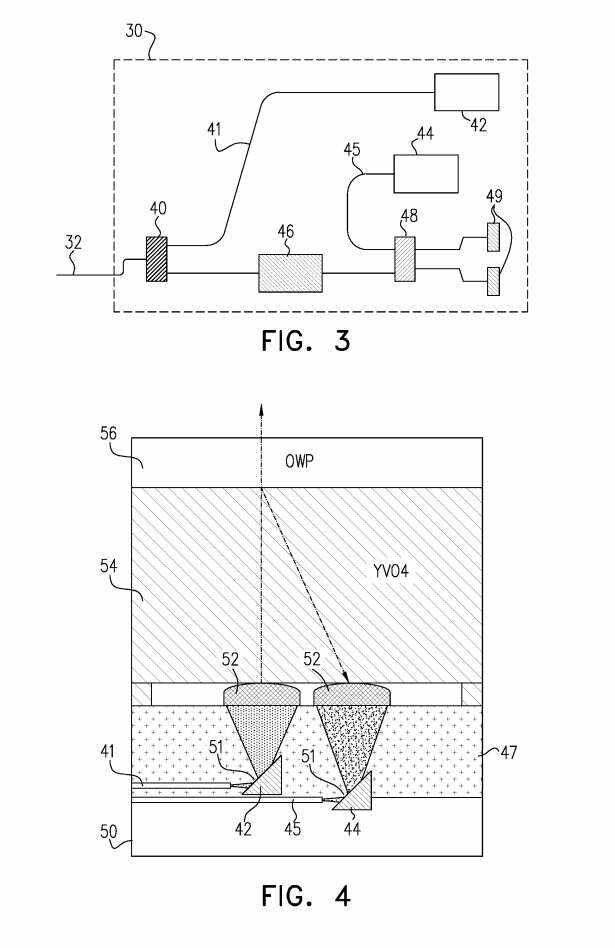
图3说明了PIC 22上阵列中的光收发器30。图3为所述收发器的俯视图,图4为所述收发器的一部分的截面视图。在本实施例中,收发器30配置为双基操作。
输入分频器40将来自波导32的入射辐射分成发射波导41和本振波导43。波导41和43,以及收发器30中的其他波导通常包括由介电包层47包围的硅或氮化硅波导芯。波导形成在平面硅衬底50上并平行于衬底运行。
发射波导41通过从转向镜的对角线表面51的反射,将出射光传输到转向镜42,以便从光收发器在与衬底50垂直的方向上输出。根据发明要求,输出的法线方向可以是相对于衬底向上,也可以是通过衬底向下。
另一个转动镜将入射光反射到接收波导中。如图4所示,一对微透镜52将反射后波导41的出射光通过转镜42准直,将反射前的入射光通过转镜44聚焦到接收波导45。四分之一波片QWP 56旋转出射光和入射光的偏振,因此入射光的偏振最终相对于出射光束中的光旋转90度。
参照图3,本实施例中的光电探测器包括一对平衡的光电二极管49,例如形成在衬底50上的硅或锗光电二极管。偏振分配器/旋转器PSR 46旋转波导43中的光的偏振以匹配接收波导45中的光的偏振。
分路器48将接收到的光与来自PSR 46的本地振荡器光束混合,并在一对光电二极管49之间将混合光分开。光电二极管49的输出被放大并传送到处理和控制电路26进行处理。例如,对于FMCW激光雷达应用,处理电路从光电二极管输出中提取信号,从而估计目标场景中各个点的距离和速度。
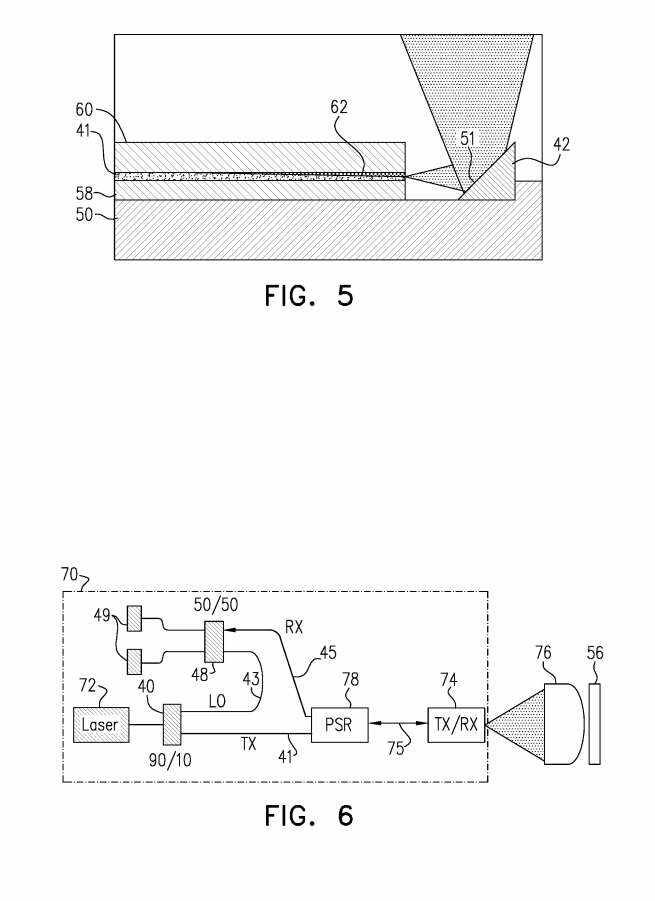
图5是光收发器30中耦出装置的示意图。本实施例中的转动镜42包括直角棱镜,其安装在衬底50上。棱镜可以由任何合适的材料制成,并且通常在反射表面上具有高反射金属或介电涂层49。或者,可通过在对角线上蚀刻硅层来制造转动镜42,使得来自波导41的光通过硅内的全内反射而偏转。
发射波导41包括硅或氮化硅波导芯,其包含在介电层58和60之间。第58层和第60层通常包含SiO2。
发射波导41的末端为锥形波导62,锥形波导62作为光斑大小的变换器,在出射光束入射到转动反射镜42之前,对出射光束的模式直径和数值孔径进行调节。透镜52对准从转动镜41反射后的出射光。锥形波导62输出处的小模径有利于光束的良好聚焦和准直。
另外,来自透镜52和设备20中PIC 22上方的其他光学表面的反向反射将不会与波导62图案匹配,从而减少了这种反向反射对收发器30中光学电路的影响。
图6是光收发器70的另一示意图。收发器70配置为单基操作,并且可以在阵列中使用。
在收发器70中,耦合单个转动镜74以反射来自发射波导41的出射光和将入射光反射到接收波导45。反射镜74可以通过合适的点尺寸转换器耦合到收发器70中的光学电路。透镜76既准直从反射镜74发出的出射光束,又将射向反射镜74的入射光聚焦到收发器70中。
激光器72产生用于从光收发器70传输的出射光束。出射光束和入射光通过双向波导75耦合到转动镜74和从转动镜74耦合。定向分路器78将发射波导41的出射光传输到双向波导75中以输出到转动镜74,将双向波导75中接收到的入射光从转动镜74传输到接收波导45。在图中示例中,定向分离器78包括PSR,其与QWP 56一起工作以将入射光与正交偏振的出射光分离。
如在上述实施例中,分路器48将来自波导45的接收光与来自波导43的本地振荡器光束混合,并在一对平衡的光电二极管49之间将混合光分开。
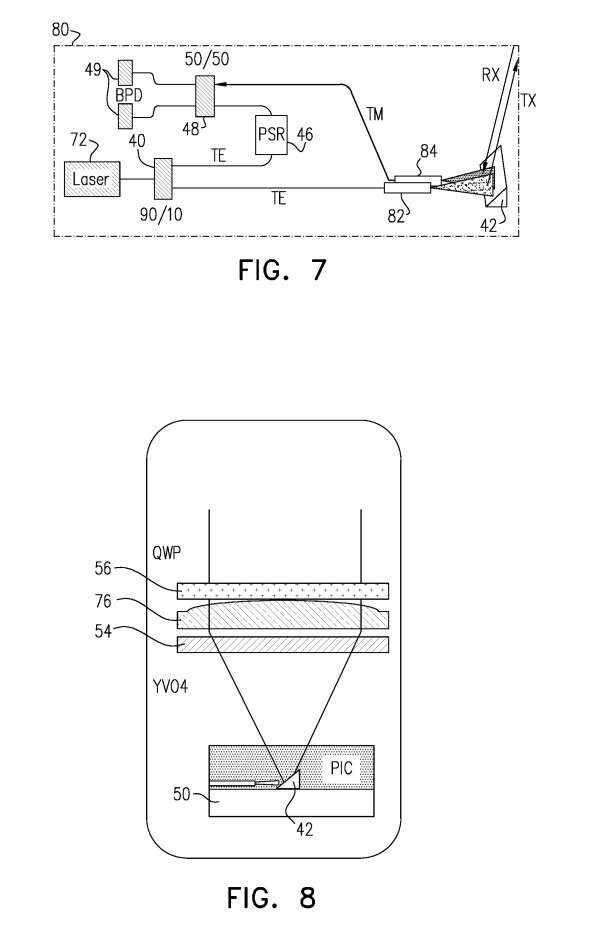
图7和图8图解地说明了光收发器80。图7是收发器的俯视图,而图8是收发器的一部分的截面视图。收发器80配置为双站操作,并且可以在PIC 22中代替收发器30使用。
在收发器80中,将发射边缘耦合器82和接收边缘耦合器84放置在相互接近的位置,使得出射和入射光束都从同一转动镜42反射。双折射晶体54对发射和接收偏振进行差分偏转,使出射和入射光束的轴线对齐。两束光共用同一个透镜。
名为“Lidar array with vertically-coupled transceivers”的苹果专利申请最初在2022年5月提交,并在日前由美国专利商标局公布。
来源:映维网
投稿:tougao@arinchina.com
稿件/商务合作: 向前(微信 Shixiangqian7)电话:18700987744
创始人:张明军(微信 13720775110)
更多精彩内容,请关注ARinChina微信公众号(ID:X增强现实)



评论